全部,
我们已经观察到 ROV 存在可重复出现的行为;我有一个针对 ArduSub 的补丁,看起来有效,但在我启动 Github 方面之前,我想先向社区征求意见。
我们的 BlueROV2 Heavy 运行的是 BlueOS-1.4 系统,搭载 Ardupilot 4.5.7 版本(也测试过 4.5.5 版本)。测试环境非常特殊:
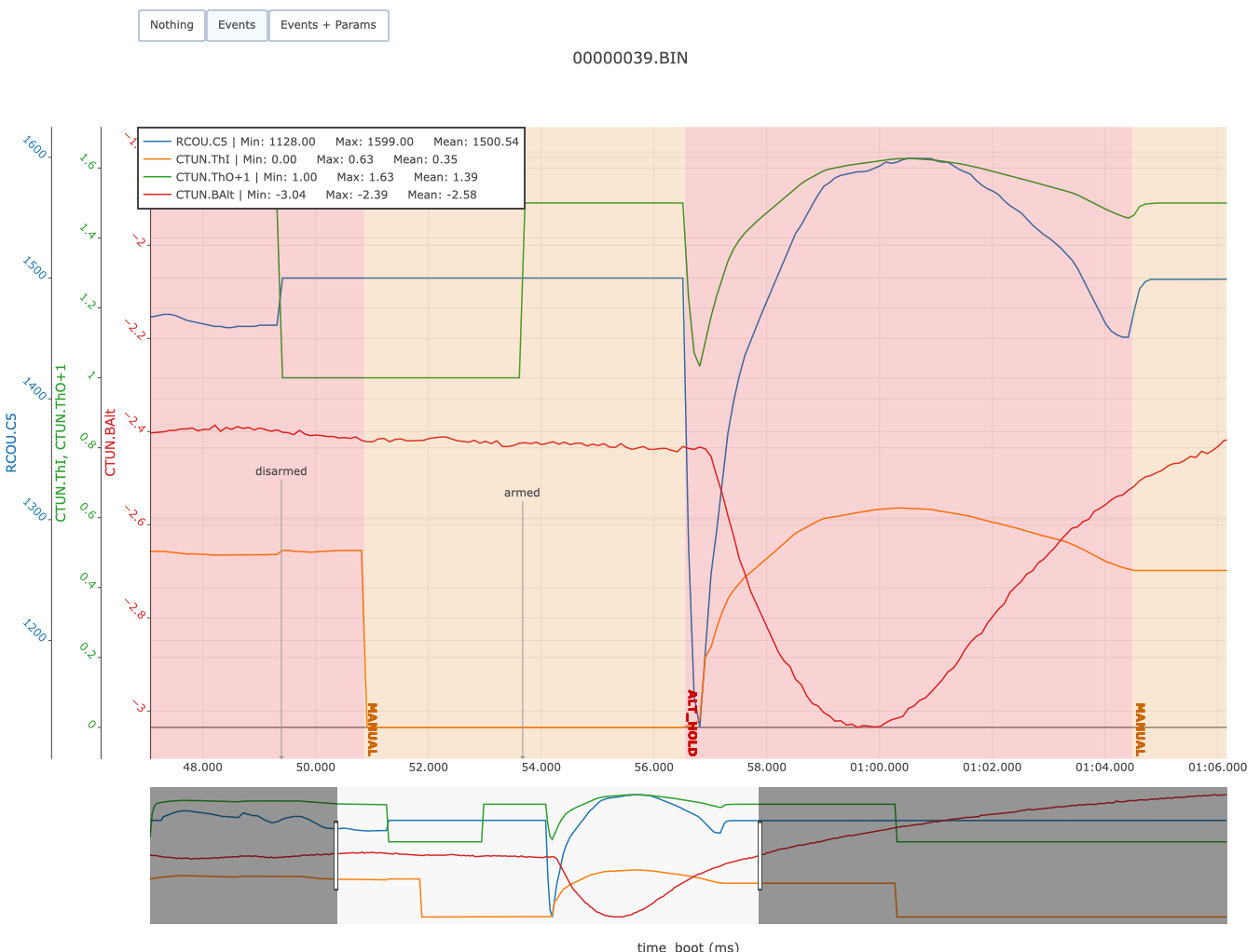
- 水中车辆,已上膛,处于备用行驶状态
- 解除车辆武装
- 设置为手动模式
- 武装车辆(当前处于手动模式)
- 设置为 Alt 键模式
车辆将突然下降约1米,然后在略低于其原始深度的位置稳定下来。第二步和第三步可以互换(先手动操作再解除武装,或先解除武装再手动操作)。
我认为这是由于Arudpilot 中的这一行代码mode_manual.cpp` 导致的:
attitude_control->set_throttle_out(0,true,g.throttle_filt);
应该是
attitude_control->set_throttle_out(0.5,true,g.throttle_filt);
其他人也能模仿这种行为吗?如果可以,我很惊讶这种行为在野外并不常见。