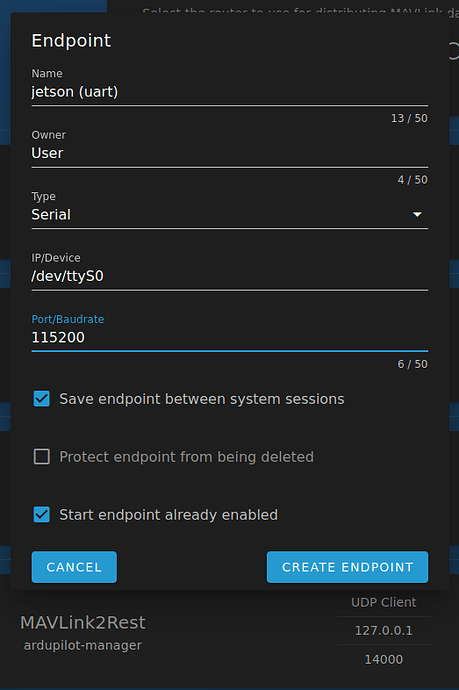
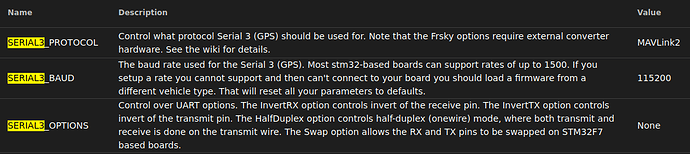
是的,我使用的是 BlueBoat 的 Raspberry Pi + Navigator 的默认配置,并希望通过串口将其连接到 Jetson 进行控制。我使用 Navigator 的串口 1根据技术细节,并使用一个适配 Jetson UART 引脚的 JST-GH。我知道无论如何这都会带来一些延迟,但我正在尝试通过串口连接来尽量减少延迟。
由于树莓派的端口正在用于板载路由器,因此不推荐使用以太网连接。我测试过通过板载网络与 Jetson 进行通信,并使用一个指向其地址的端点,但连接可靠性存在问题。
如果我能弄清楚为什么无法发送命令,串口就完美了。奇怪的是,我可以用 MAVLink-Server 端点建立连接并读取 Jetson 上的数据,但我的消息却无法返回到自动驾驶仪。
在 Jetson 端,连接如下所示:
if host == 'uart':
self.master = mavutil.mavlink_connection('/dev/ttyTHS1', baud=115200)
elif host == 'network':
self.master = mavutil.mavlink_connection('udp:0.0.0.0:14551')
/dev/ttyTHS1 是 Jetson 上的 UART 地址。通过网络连接时,我所有的控制功能都运行正常,但通过 UART 连接时,命令无法返回。
告诉我这是否合理,以及我是否可以提供更多信息。谢谢你的帮助!