我们有一台定制的水下遥控潜水器(ROV),运行ArduSub系统,其推进器布局与标准的BlueROV 6DOF配置相同。该潜水器采用两个独立的压力舱:电池舱和电子设备舱。电池舱内装有一块6S 10000mAh锂聚合物电池,电池的正负极线通过穿刺器直接连接到电子设备舱,中间没有任何开关或断路。
在电子管内部,电池电量分配给八个独立的30A电调(ESC),所有电调的正负极线都连接到一条公共电源总线上。Pixhawk电源模块也连接到同一条电池总线上,为Pixhawk供电。Pixhawk还连接到一台树莓派,作为辅助计算机。
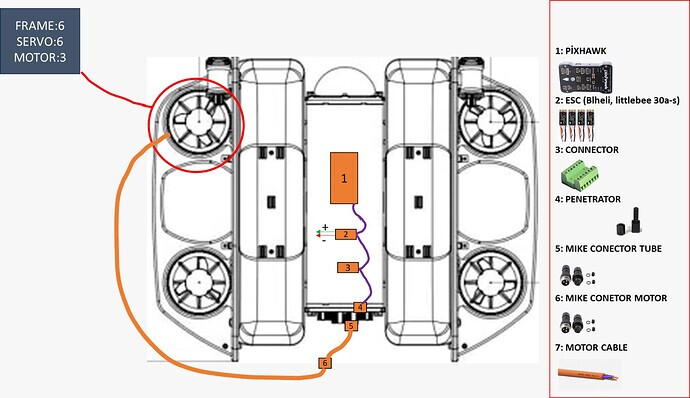
该潜水器共有八个推进器,其排列方式与 BlueROV 6DOF 完全相同:四个垂直推进器(顶部安装)和四个轴向推进器(水平安装)。由于压力管的机械设计,电缆并非按推进器功能划分,而是按端盖进行分隔。前端端盖承载两个垂直推进器和两个轴向推进器的电缆,后端端盖承载剩余两个垂直推进器和两个轴向推进器的电缆。
每个推进器都通过一个3针防水连接器连接,连接器后接一个穿刺器。在电子管内部,电机相线穿过一个便于维护的接线端子,然后连接到各自专用的30A电调。电机相线采用3根1.5mm²的PUR电缆。
八根电调信号线分别随机连接到Pixhawk的PWM输出端,正确的电机到输出的映射关系稍后在QGroundControl中进行配置。所有ArduSub电机参数均已验证。
我遇到的问题是,6号推进器(电机)在水下无法产生预期的推力。推进器会旋转,但产生的推力与其他推进器相比明显较弱。这种情况仅在潜水器潜入水中时出现;在空气中,推进器似乎工作正常。
为了排除硬件问题,我更换了电机、电调和飞控,加固了电源分配线路,交换了电调信号输出,并确认问题与任何特定的电子元件无关。尽管做了这些努力,问题仍然出现在推进器的同一物理位置(#6)。
此外,正如视频所示,当我们尝试让车辆在泳池中浮出水面时,5号、7号和8号电机的推力良好,但6号电机的推力不足,导致车辆浮出水面时重心不稳。
https://drive.google.com/file/d/1UclccwHXfbix8_2IuzLjtZcS9u3b1PGf/view