我刚刚将我的 Bluerov 升级到 Heavy,并配有导航卡。
我按照指南操作,一切似乎都很顺利。
然而,当我把BlueRov调到手动模式时,电机就开始旋转了。我记得在升级到导航仪之前没有发生过这种情况。
在我把它放进水里之前,有人能确认一下这是正常的吗?如果不正常,能帮我解决一下吗?

我刚刚将我的 Bluerov 升级到 Heavy,并配有导航卡。
我按照指南操作,一切似乎都很顺利。
然而,当我把BlueRov调到手动模式时,电机就开始旋转了。我记得在升级到导航仪之前没有发生过这种情况。
在我把它放进水里之前,有人能确认一下这是正常的吗?如果不正常,能帮我解决一下吗?
启动时处于什么模式?如果不是手动模式,推进器预计会旋转,因为它们的作用是稳定飞行器,在空中不会有反应。如果你处于手动模式,推进器开始运转,你可能需要校准摇杆或确认其配置正确。
您使用的是 Cockpit 还是 QGround Control?您使用的 BlueOS 是什么版本?您两个新推进器的电机方向设置正确了吗?
我确保处于手动模式。
地面控制没问题。我启动电机后,电机就关闭了,只有摇杆动作时电机才会响应。
在驾驶舱中,当我做同样的事情时,发动机立即开始运转。
驾驶舱:1.15.2
BlueOS:1.4.2
Qground 4.2.8
采用空气吹扫技术将马达配置在水面上。
目前,我还没有将 ROV 放回水中,因为在启动时启动马达存在问题。
鉴于在 Qground 上完成了相同的配置并且似乎可以正常工作,因此操纵杆似乎配置正确。
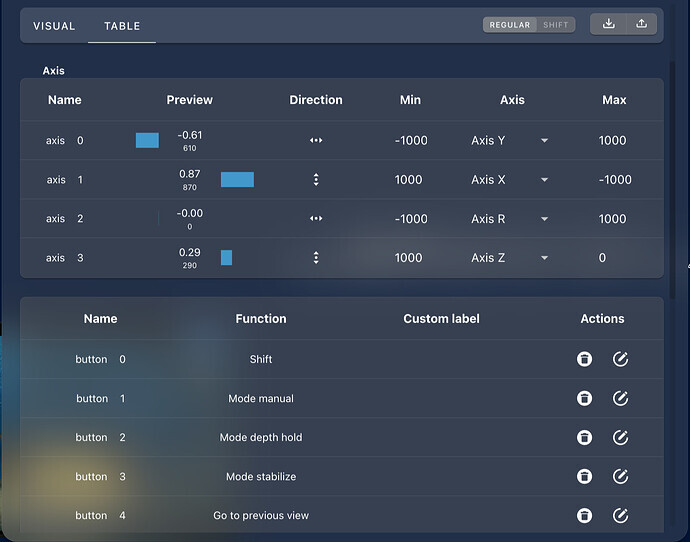
我猜 Cockpit 的操纵杆轴设置不正确,尤其是垂直推进器(z 轴 - 1000 到 0)。您能分享一下操纵杆配置的截图吗?表格视图,以及运动轴映射的顶部?这里的文档或许能帮您找到正确的值来解决这个问题。
谢谢你的帮助。我最终在设置中做了以下操作:
删除并重新安装 Cockpit:没有效果
格式化并重新安装我的 Raspberry 上的 BlueOS 基本版本:好的,连接 Cockpit 后,一切正常并且可以正常工作。
所以,我不知道问题出在哪里,但至少现在没问题了。
再次感谢您的支持。