
大家好!
我们目前正在排查BlueBoat 系统的一些导航问题。在手动模式 下,船只可以正常启动和移动,但当我切换到自动 或巡航模式 时,系统立即显示:
“AHRS:未使用已配置的AHRS类型”
并拒绝启用这些模式。
手动布防时,我还会收到以下警告:
“EKF方差 ”
尽管在这种模式下,车辆在水面上仍然可以正常运行。
设置详情:
- 平台: BlueBoat
- 自动驾驶仪: Pixhawk 运行ArduPilot 4.6.2
- BlueOS 版本: 1.3.1
- SonarView: 1.14.1
- 连接方式: 通过基站(以太网)连接到 BlueOS Web 界面
- 控制软件: QGroundControl(版本 4.2.8)
我们已通过QGC校准了指南针和加速度计,并验证了GPS定位的稳定性(HDOP)。船只已按照软件指南中的所有步骤完成配置。
尽管如此,这个问题依然存在。
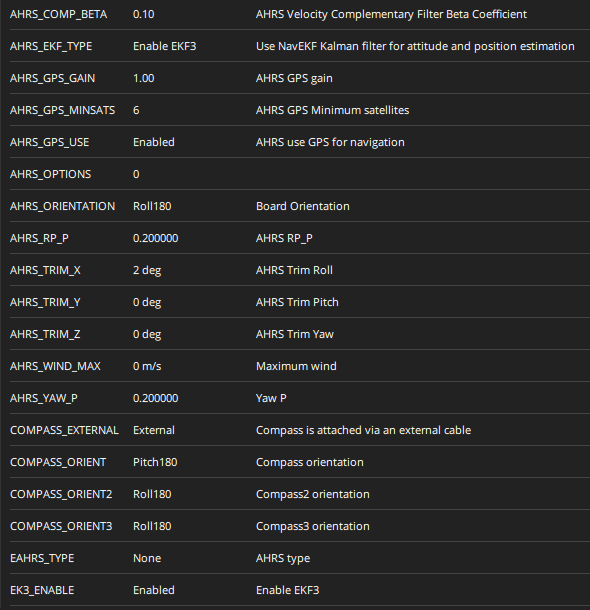
以下是车辆上当前配置的所有**AHRS相关参数的屏幕截图:
问题:
- 当 GPS 和 IMU 数据看起来有效时,通常是什么原因导致出现“AHRS:未使用已配置的 AHRS 类型”的错误?
- “EKF方差”警告是否与传感器冗余(双GPS或IMU配置错误)有关?
- 在ArduPilot 4.6.2 下,BlueBoat(双 GPS、EKF3、AHRS 设置)有哪些推荐参数?
提前感谢您的任何帮助或推荐!