
我的BlueROV推进器有一个问题,就是通电下水后,推进器不启动或者说不受控制。之前一直在正常工作,突然出现了这个问题。。。
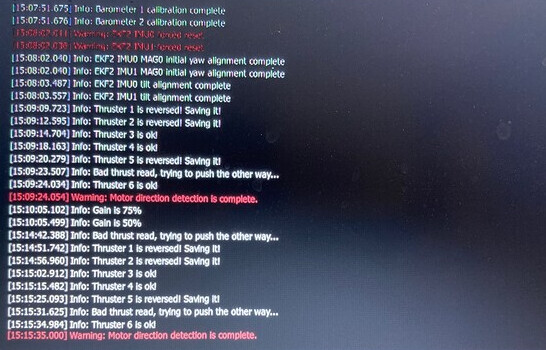
预先进行自动测试,显示所有推进器都启动了并运行良好,但是点开日志看到一天消息说“bad thrust read, trying to push the other way”
ROV进行过校准,手柄也连接上了,通电后发出提示音但是没有一个推进器工作
所有线缆也检查过是否松动,qgc也重装了
从截图来看,方向检测正在持续完成,“bad thrust read, trying to push the other way”我希望它只是在检测试图为每个推进器找到正确方向时进行记录。
ROV进行过校准,手柄也连接上了,通电后发出提示音但是没有一个推进器工作
提示音是什么样的?每个推进器应该有5次启动提示音,开始时有3次音调升高的声音,表示每个推进器相位与电调相连,然后当电调接收到有效的控制信号时有一次较长的低鸣,当该信号被设置为中值(1500)时有一次高鸣。
所有线缆也检查过是否松动,qgc也重装了
如果布线没有问题,可以试试重置参数
还是不行的话,尝试将ArduSub, BlueOS / Companion, QGC更新成最新推荐的版本